Been thinking about another project. I have an older Worx Landroid WG794 robotic lawn mower. I bought it back in 2016 and it has worked reliably since then. A few minor repairs, but it is very solidly built. The biggest deficiency is that it is more of an appliance. It has a simple keypad interface and no network connectivity. You set it up and ignore it.
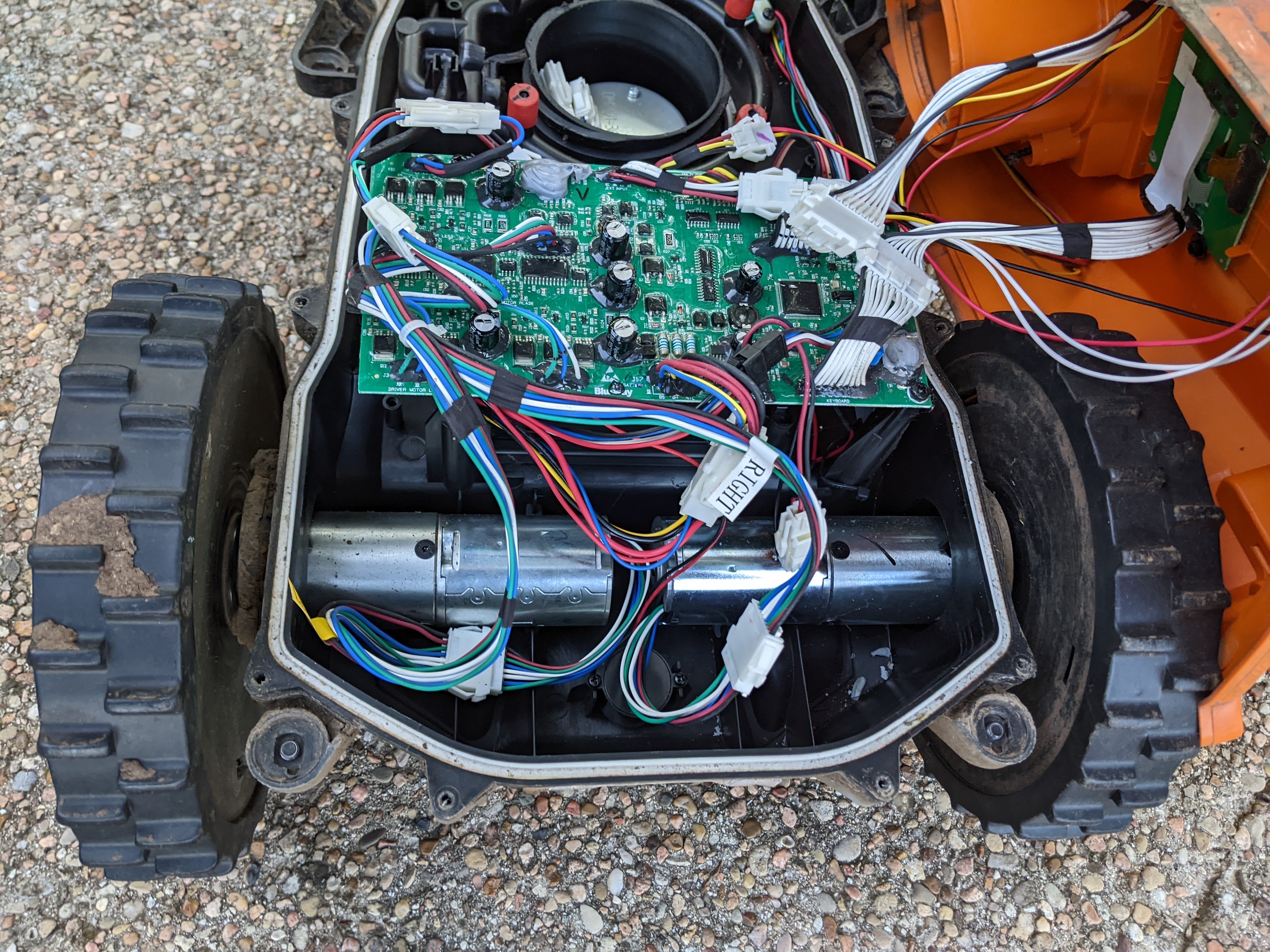
I have taken it apart for a minor repair. There is a small battery on the main board that keeps the clock going. Well the battery died and it isn’t easy to replace. Worx wanted to sell me a new main board and have me ship the unit to them for service. Been working without the clock functions, which is basically the scheduling of mowing. So I just turn it on when I remember and it runs until, well, I’m not sure why it stops. Maybe for a recharge. But I bought a replacement battery and think I have replaced it. Will know more when I put everything back together.
There is also a recurring “lifted up” error when it bumps a tree, but only sometimes. Seems to be getting worse. Found a small magnet and a sensor that detects when someone (or something) is lifting up the running mower. Mostly a safety feature, but now it keeps shutting off the mower. People on line have discussed it. Looks like the problem is the magnet is rusted out. Wrote Worx about a replacement and might try a substitute magnet.
One I had the unit open I started to think about hacking it. Other folks have tried to reverse engineer the software but that doesn’t help much. I am thinking of and putting in a Raspberry Pi with WiFi. All I really need to do is control two wheels and the blade. Would probably use the existing boundary wire and sensors. Some notes:
Motors: I have only worked with simple DC motors and controllers. These are three phase brushless motors. Been reading up but still not comfortable. Also there are two sets of three wires for each wheel motor. Maybe for forward and reverse? Don’t know if there are special controllers for this sort of thing. Lots to learn here.
WiFi: networked / remote control is nice, but the best part will be just making development easier. No cross platform tools and no flashing boot drives, etc. Plus all the debug advantages. The plan might be a simple layer for starters that does forward, backward and turn. Ignore everything else at first, then add in sensors and behavior.
Perimeter Boundary Wire: maybe in the future do something fancy with vision or high definition GPS. For now I’ll have to reverse engineer the sensors. I am told it is just a 70 Hz signal. Could maybe even reproduce with an audio amplifier.
Battery: the docking station is nice and might take a little bit of software. Not sure how to monitor the battery and see if it needs charging. Was thinking about using a standard removable Worx 20V battery like their other power tools use. Then just pop it out and put it on the charger when it runs low. Probably stick with the docking station until it breaks and can’t be replaced.
I guess if my repairs all work, no reason to hack up a perfectly good mower. But I might just anyway.



Hi!
I got my hands on an old one too …. Did you continue with the project? Did you ‘hack’ it ?
LikeLike
I have since moved from Texas to New Mexico where I have no lawn. I left the Worx Landroid for the new owner. It is a solid piece of hardware, well designed and well built. But the electronics and interface are a bit dated. I was going to rip out all the controls and replace with a Raspberry Pi and gradually add capabilities. I never did find a good solution for the boundary wire. There are solutions out there (beacons, video) but I would not have had time to implement them. Good luck with the project!
LikeLike